Zhuo Chen
King's College London, London, UK.

I am a final-year Ph.D. candidate in the Robot Perception Lab (RPL), supervised by Prof. Shan Luo at King’s College London. I am also a Research Scientist Intern at the Nvidia Seattle Robotics Lab, hosted by Yashraj Narang and Iretiayo Akinola. I collaborate closely with Prof. Jiankang Deng at Imperial College London on embodied AI. My research is driven by a passion to advance robot dexterity with human-level tactile intelligence. My Ph.D. work primarily focuses on: (1) robot tactile/force sensing and control; (2) foundation models across diverse tactile sensors, including vision-based sensors and electronic skins; and (3) vision-tactile-language-action (VTLA) models for contact-rich robot grasping and manipulation tasks. I contribute to above areas by designing/fabricating new sensor/skins, leveraging physical simulation techniques, sim-to-real transfer, and deep learning-based methods, including generative learning, transfer learning, and imitation learning.
Beyond my research, I actively serve the academic community as a reviewer for T-RO, RA-L, RSS, ICRA, IROS, et.al. I am honored to be selected for the 2026 cohort of RSS Pioneers. Additionally, I serve as the Program Chair for the 7th ViTac workshop at ICRA and the Local Arrangements Chair for the 6th UK Robot Manipulation Workshop.




news
| Jul 15, 2026 | VTLoc is accepted to R-AL. Congratulations to Zhiyuan! |
|---|---|
| Apr 29, 2026 | I am very honored to be selected as 2026 cohort of RSS Pioneers! See you in Sydney! |
| Apr 23, 2026 | I am invited by Springer Nature as guest editor to publish a special issue regarding visual-tactile sensing in the International Journal of Computer Vision (IJCV). Stay tuned! |
| Mar 29, 2026 | Native-Domain Camera–LiDAR Calibration has been accepted by R-AL! Congrats to Ni! |
| Mar 28, 2026 | Peg-in-Hole Assembly Learning from Peg-out-of-Hole Disassembly has been accepted by RA-L! Congrats to Yongqiang! |
| Feb 21, 2026 | Semantic-VLA has been accepted to CVPR2026 ! |
| Feb 15, 2026 | Our 7th ViTac Workshop has been accepted to ICRA2026. I will be serving as Program Chair. Stay tuned ! |
| Jan 31, 2026 | MagicSkin has been accepted to ICRA2026, congratulations to Timi, the first Msc. student I mentored for his individual project at Kings! Very well done ! |
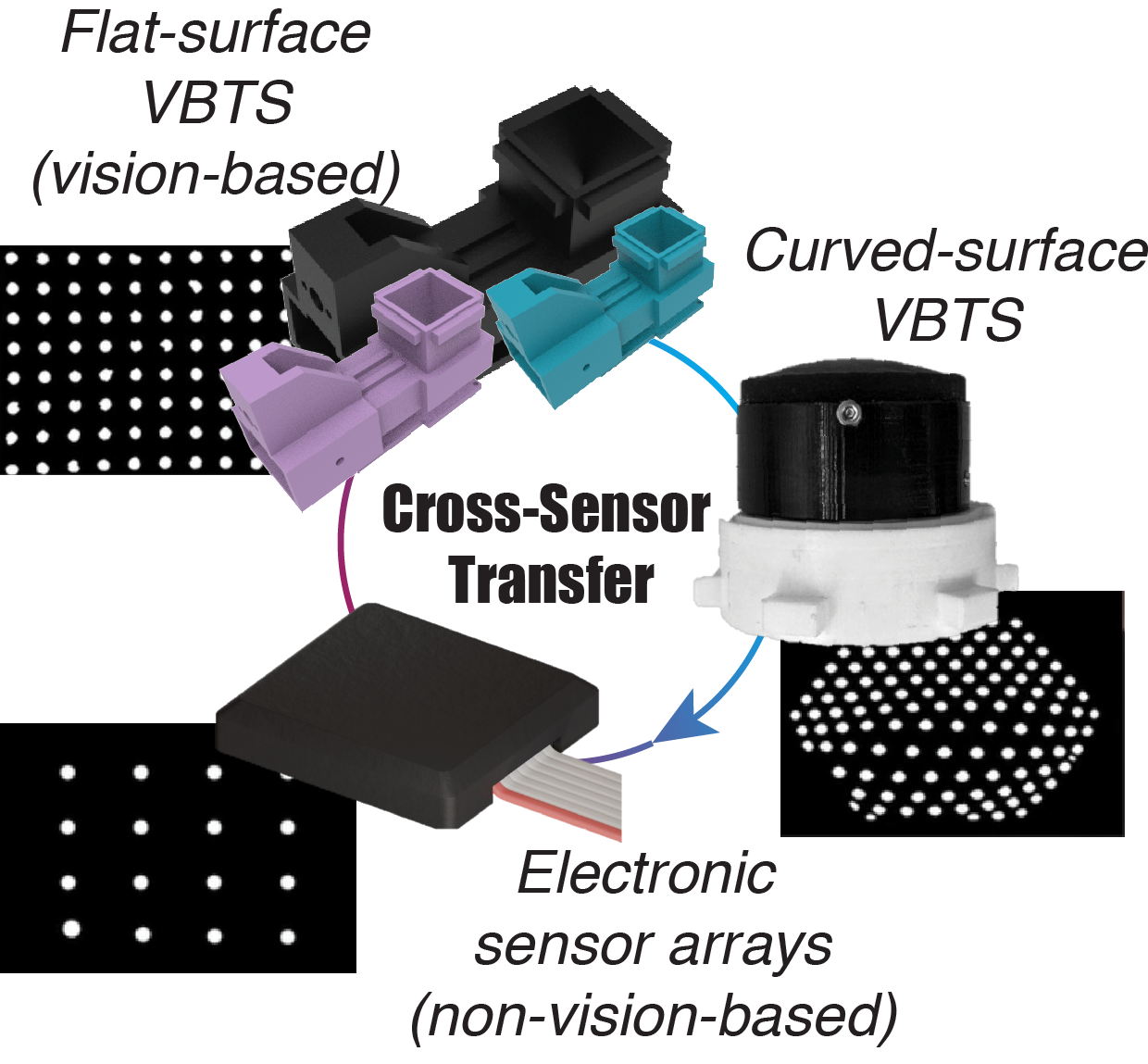
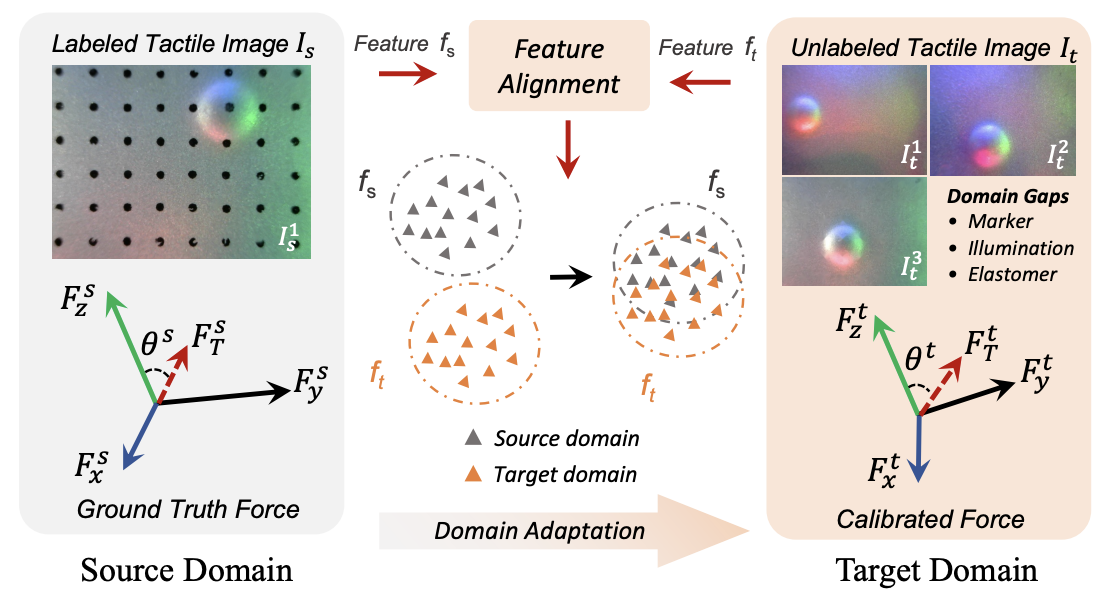
| Jan 15, 2026 | GenForce, a framework for transferable force sensing across diverse tactile sensors has been accepted to Nature Communications! |
| Jan 04, 2026 | SimTac has been accepted to Cyborg and Bionic Systems, congratulations to the Xuyang! |
| Dec 19, 2025 | I will be joining in Nvidia Seattle Robotics Lab as a Research Scientist Intern in 2026 summer! Look forward to this journey! |
| Sep 30, 2025 | ViTacGen is accepted to R-AL. Congratulations to Zhiyuan! |
| Jun 30, 2025 | Surrogate Diffusion has been accepted to IROS 2025! |
| Jan 30, 2025 | TransForce has been accepted to ICRA 2025! |
| Jan 08, 2025 | I am honored to be the co-organizer (local arrangement chair) of the 6th UK Robot Manipulation Workshop. More than 300 attendees from academia, industry and tech-company are hosted at King’s! |
Selected publications · Google Scholar
- Nature Comm. 2026
- ICRA2026
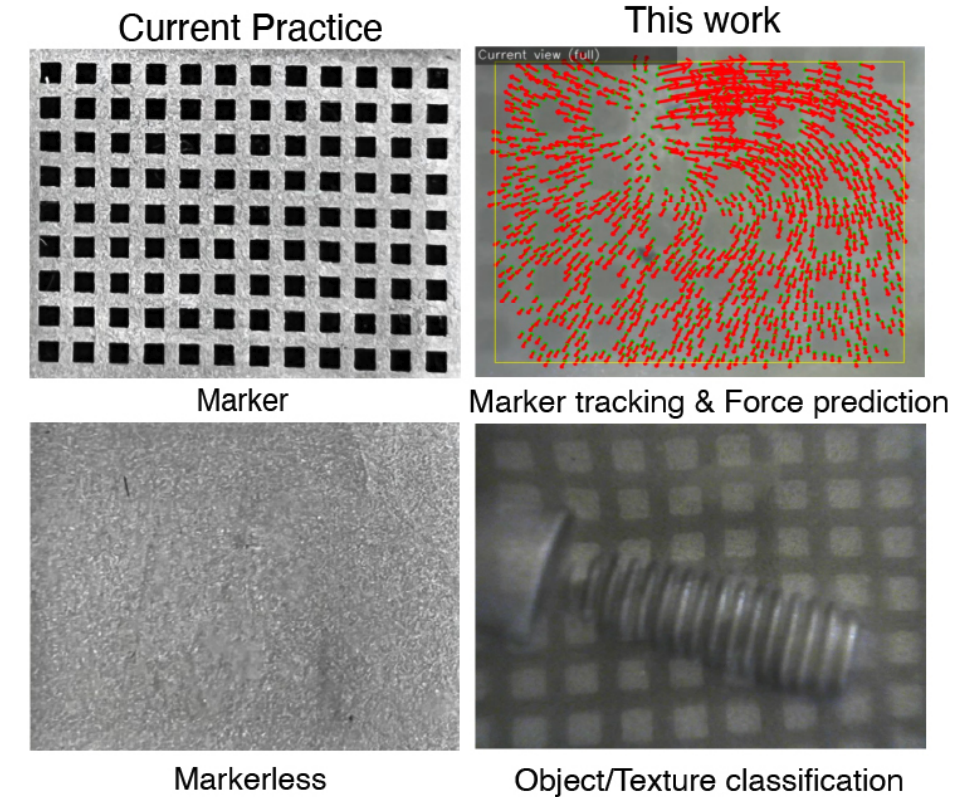 MagicSkin: Balancing Marker and Markerless Modes in Vision-Based Tactile Sensors with a Translucent SkinICRA2026, 2026
MagicSkin: Balancing Marker and Markerless Modes in Vision-Based Tactile Sensors with a Translucent SkinICRA2026, 2026 - arXiv2602.01153
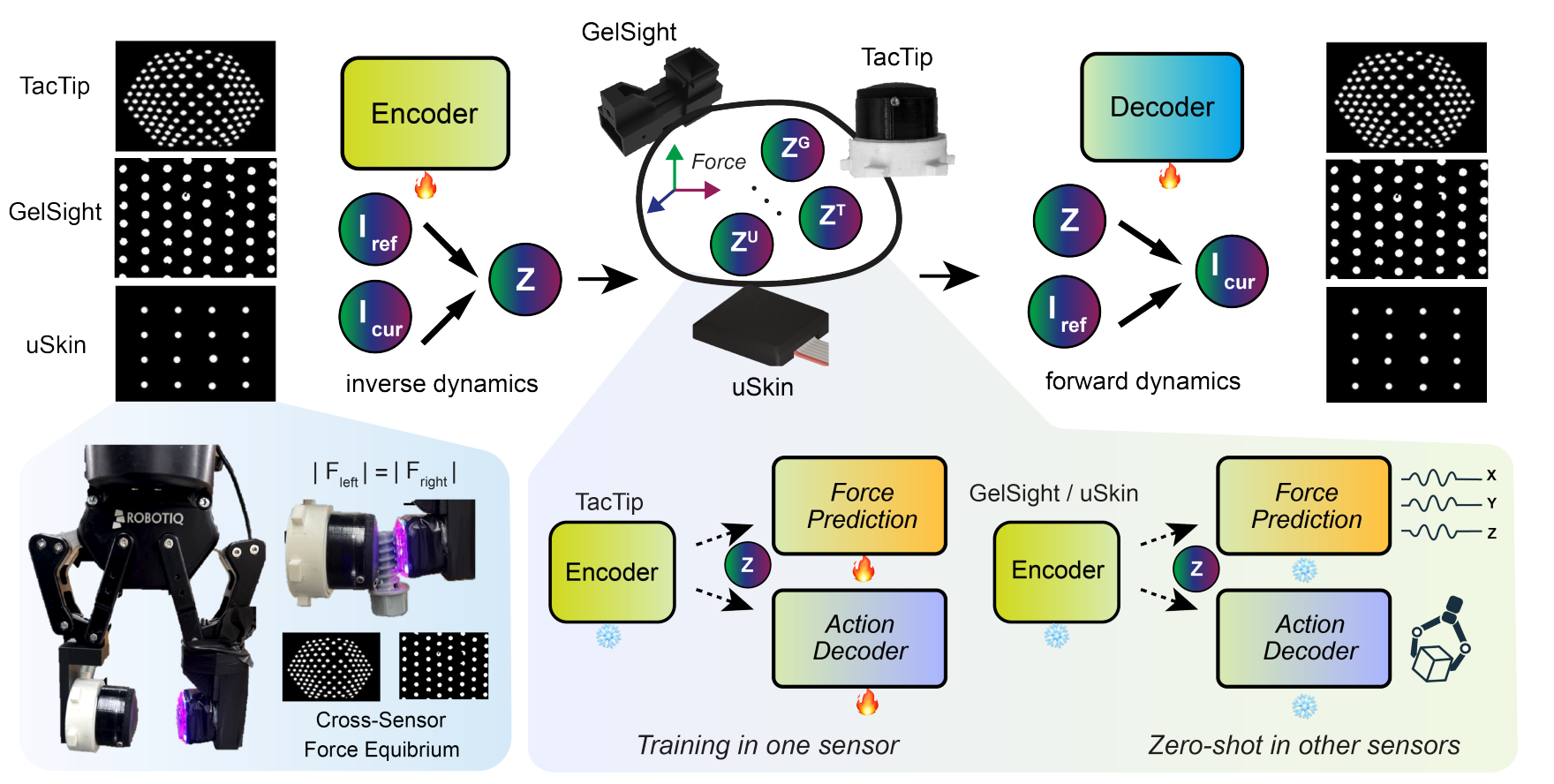 UniForce: A Unified Latent Force Model for Robot Manipulation with Diverse Tactile SensorsarXiv preprint arXiv:2602.01153, 2026
UniForce: A Unified Latent Force Model for Robot Manipulation with Diverse Tactile SensorsarXiv preprint arXiv:2602.01153, 2026 - ICRA 2025
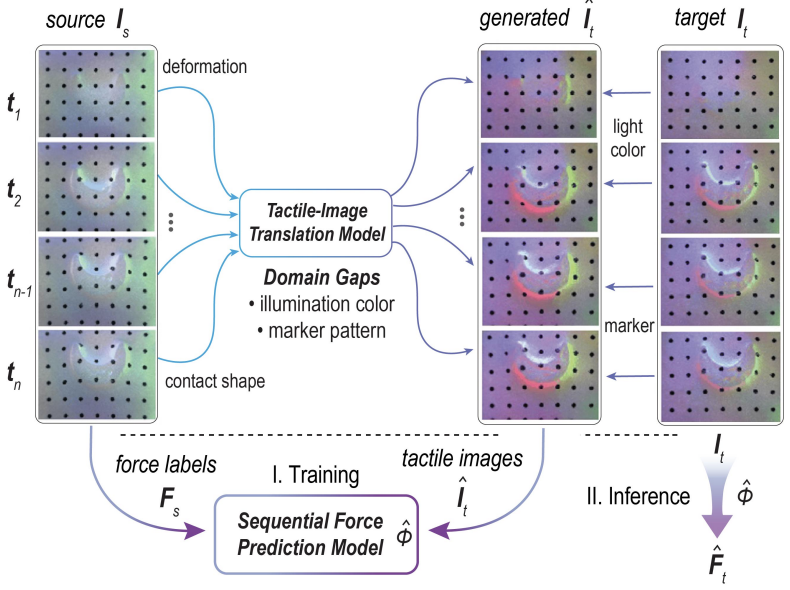 TransForce: Transferable Force Prediction for Vision-based Tactile Sensors with Sequential Image TranslationICRA, 2025
TransForce: Transferable Force Prediction for Vision-based Tactile Sensors with Sequential Image TranslationICRA, 2025 - IROS 2024
- ACS ami
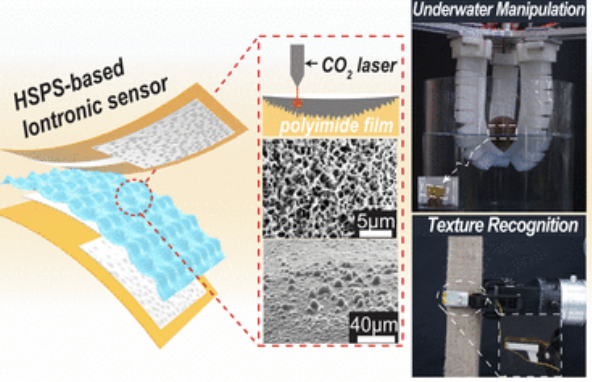 Laser-sculptured hierarchical spinous structures for ultra-high-sensitivity iontronic sensors with a broad operation rangeACS Applied Materials & Interfaces, 2022
Laser-sculptured hierarchical spinous structures for ultra-high-sensitivity iontronic sensors with a broad operation rangeACS Applied Materials & Interfaces, 2022